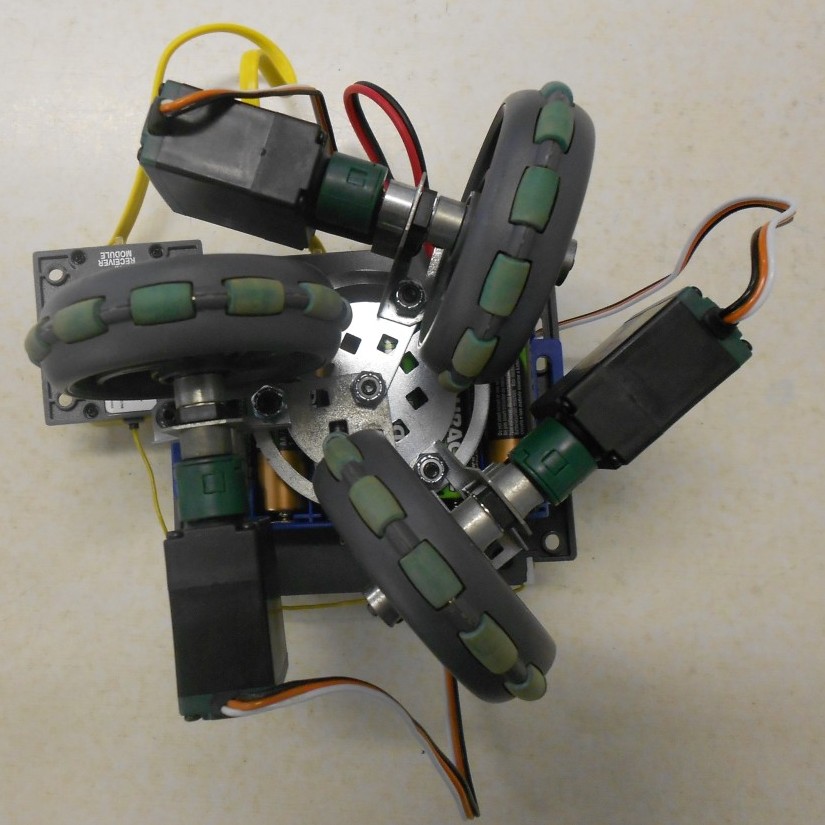
TRISS - Triangular Robot Inspiring AwesomeneSS
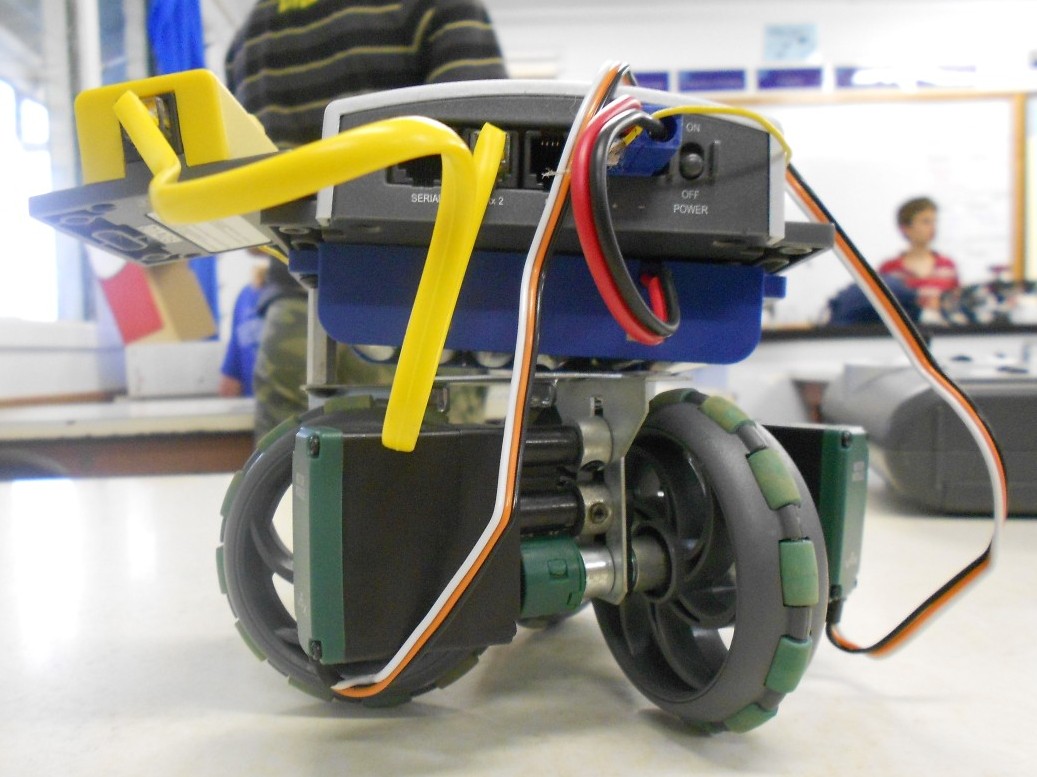
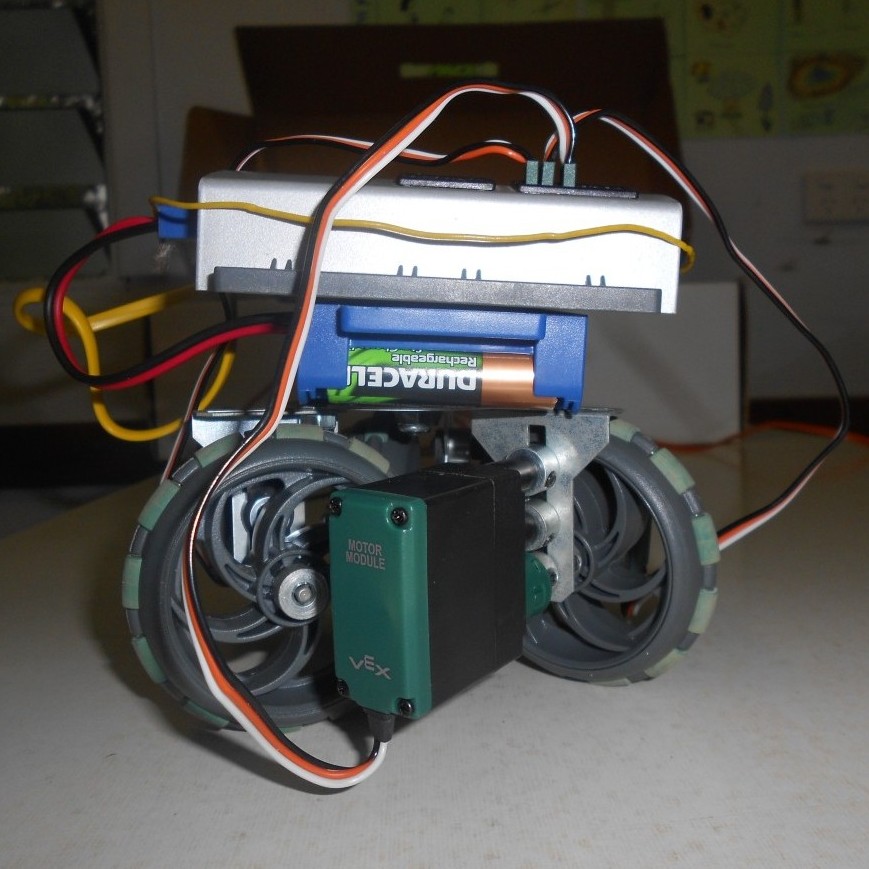
I am a member of my school VEX robotics club. For this particular project, I wanted to use three fixed omni-directional wheels to drive in any direction. I finished TRISS in about six hours spread over three weeks.
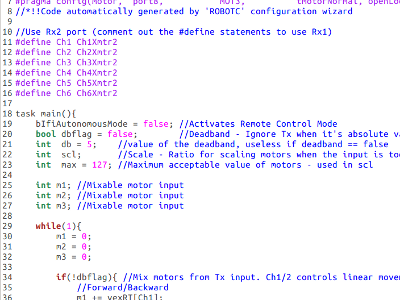
I programmed TRISS with RobotC. The code I used while filming the video isn't pretty or commented enough IMO, so I made a new, cleaner version with support for a deadband. I didn't have a chance to test this code before dismantling TRISS, but it successfully compiles. You can download my original code here, but I suggest perusing my cleaned-up code instead.
As you can see from the video, it can drive quite effectively. It was fairly difficult to control, but I imagine with more time I could fix this with better motor-mixing algorithms. I do think it has pretty awesome turning abilities, as seen in the video below at 50 seconds.